ELETRÔNICA ANALÓGICA
Acadêmico desenvolve sistema de controle de robô através de sinais neuromusculares
29/12/2016 às 01:19

.jpg) A curiosidade e o ímpeto inovador do acadêmico Alexandre Pereira, do curso de Engenharia Elétrica da UNIARP resultou no desenvolvimento de um sistema de controle de um robô através de sinais neuromusculares. A pesquisa foi tema do Trabalho de Conclusão de Curso (TCC) de Alexandre. Ele foi orientado pelo professor Eng. Mestre Fabrício Páris.
A curiosidade e o ímpeto inovador do acadêmico Alexandre Pereira, do curso de Engenharia Elétrica da UNIARP resultou no desenvolvimento de um sistema de controle de um robô através de sinais neuromusculares. A pesquisa foi tema do Trabalho de Conclusão de Curso (TCC) de Alexandre. Ele foi orientado pelo professor Eng. Mestre Fabrício Páris.
O acadêmico apresentou uma interface eletrônica para amplificação e condicionamento dos sinais elétricos que controlam os músculos, tornando possível controlar um robô com maior capacidade de realizar esforços físicos que uma atividade humana seria capaz. “O circuito eletrônico projetado tem a característica de selecionar exatamente os sinais correspondentes à atividade muscular, utilizando-se de filtros ativos implementados em eletrônica analógica, depois eles são amostrados e processados digitalmente, então é utilizado como referência para comandar o braço robótico, que realizará o maior esforço”, explica Alexandre.
O trabalho do acadêmico alia o conhecimento do corpo humano e de diversas áreas da engenharia, evidenciando uma tecnologia que pode ser usada tanto para reabilitação de pessoas com paralisias ou até ausência de membros, quanto para aumentar a força e resistência da pessoa, como nos casos dos exoesqueletos militares.
 De acordo com Alexandre, existem hoje inúmeros fatores que incentivam o desenvolvimento destes dispositivos, como por exemplo, a incidência de inúmeros processos trabalhistas devido a lesões por esforços repetitivos (LER) ou até mesmo acidentes de trabalho causados pela exigência de esforço além dos limites humanos. “Aliando os conhecimentos de tratamentos de sinais elétricos, adquiridos no curso de Engenharia Elétrica com o estudo dos estímulos elétricos que regem nossos movimentos obtidos na Eletromiografia, vislumbrou-se a possibilidade de integrar dispositivos ao corpo humano dando-lhe características nunca antes possíveis”, relata.
De acordo com Alexandre, existem hoje inúmeros fatores que incentivam o desenvolvimento destes dispositivos, como por exemplo, a incidência de inúmeros processos trabalhistas devido a lesões por esforços repetitivos (LER) ou até mesmo acidentes de trabalho causados pela exigência de esforço além dos limites humanos. “Aliando os conhecimentos de tratamentos de sinais elétricos, adquiridos no curso de Engenharia Elétrica com o estudo dos estímulos elétricos que regem nossos movimentos obtidos na Eletromiografia, vislumbrou-se a possibilidade de integrar dispositivos ao corpo humano dando-lhe características nunca antes possíveis”, relata.
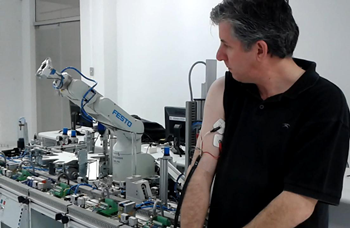
Uma forma de obter esta amplificação de força é através da atuação em dispositivos como braços robóticos. No caso do trabalho do acadêmico, os testes foram feitos no braço robótico da marca Mitsubish, modelo RV-2AJ, do Laboratório de Robótica da UNIARP.
Os testes
Para testes e validação do sistema foram interligadas todas as etapas de tratamento analógico do sinal ao arduino e este, por sua vez, ligado via Bluetooth ao computador que comanda o robô. Foram utilizados sinais reais obtidos através de posicionamento dos sensores de superfície nos músculos bíceps e tríceps. Com a movimentação, contração e relaxamento da musculatura monitorada, foi possível registrar a obtenção dos sinais mioelétricos. CONFIRA NO VÍDEO: https://www.youtube.com/watch?v=OGE_RCdfi4M&feature=youtu.be
Objetivo atingido
Os testes em laboratório para a validação do sistema eletrônico evidenciaram que, após devidos ajustes, o sistema possui uma resposta satisfatória para a execução dos movimentos. “No entanto, para o desenvolvimento de uma interface com fins comerciais ou industriais, faz-se necessário a realização de algumas alterações, como por exemplo, a melhoria dos sensores, tanto na sensibilidade quanto na usabilidade, tornando-os mais amigáveis de se utilizar. Como seguimento para este projeto de pesquisa, cabe a investigação de métodos de aplicação destes conhecimentos na elaboração de próteses inteligentes que possuam movimentos de mão mais complexos ao monitorarmos mais músculos simultaneamente, formando uma maior possibilidade de movimentos que os tradicionais movimentos de pinça da grande maioria das próteses”, conclui.

Comentários